
Spokesperson
Phone:
+49 711 685 82786
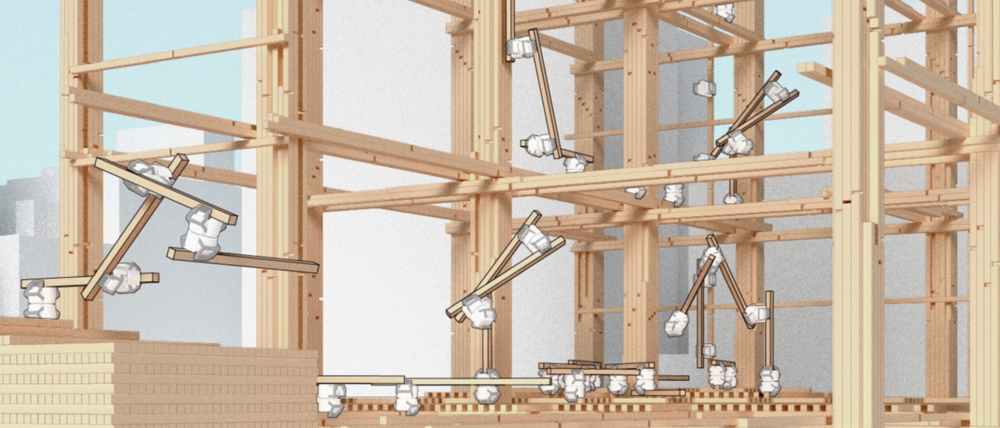
The project focuses on the investigation of in-situ construction and assembly processes on the construction site using distributed robotic systems (“distributed robotics”). The term refers to a large number of small, agile construction robots that can build complex, functionally adapted assemblies from individual parts in highly parallel processes. This is a fundamentally different approach than the current trend towards the automation of pre-digital construction machines such as tower cranes. The advantage of distributed robotics is that the machines are small and inexpensive and can therefore be operated in parallel in large numbers. Distributed robotics also promises significant benefits in terms of solubility, sorting purity and reusability of components. From a large number of identical parts, context-specific, functionally adapted and thus resource-efficient building constructions can be built and dismantled or disassembled and returned for reuse. In order to exploit the potential of these emerging robotic technologies for the construction industry, fundamental research is needed into building systems and construction methods that are genuinely designed for such radically different construction processes.
The aim of the project is to explore the basic features and characteristics of timber building systems that will unlock the potential of distributed robotics for the construction industry. Timber is chosen as a lightweight, sustainable and easily machinable material that can be assembled by small machines. The timber industry and current timber construction standards also provide a backdrop for evaluating the application of such novel systems to building construction.
Fundamental knowledge about a radically new approach to automation in the building industry is to be gained, which in the future will be able to make a significant contribution to solving the current challenges of the building industry.
Prof. Achim Menges
Institute for Computational Design and Construction (ICD), University of Stuttgart
Dr.-Ing. Tobias Schwinn (ICD)
Nicolas Kubail Kalousdian (ICD)
Samuel Leder (ICD)
Bundesinstitut für Bau-, Stadt- und Raumforschung (BBSR) im Bundesamt für Bauwesen und Raumordnung, Innovationsprogramm Zukunft Bau
“Entwicklung von Holzbausystemen für Bauprozesse mittels Verteilter Robotik”, F20-19-1-197